Real-Time Simulation of Physical Systems Using Simscape
In this webinar we will demonstrate how to configure models containing Simscape physical networks to run in real time. We will explain the tradeoff of simulation speed and accuracy in real-time simulation, and explain the settings you can adjust to balance this tradeoff. The demonstration is performed on a model of a pneumatic actuation system, but the concepts have been applied to models spanning hydraulic, electrical, mechanical, and other physical domains.
This webinar will include demonstrations and explanations to show:
• The challenge of moving from desktop simulation to real-time simulation
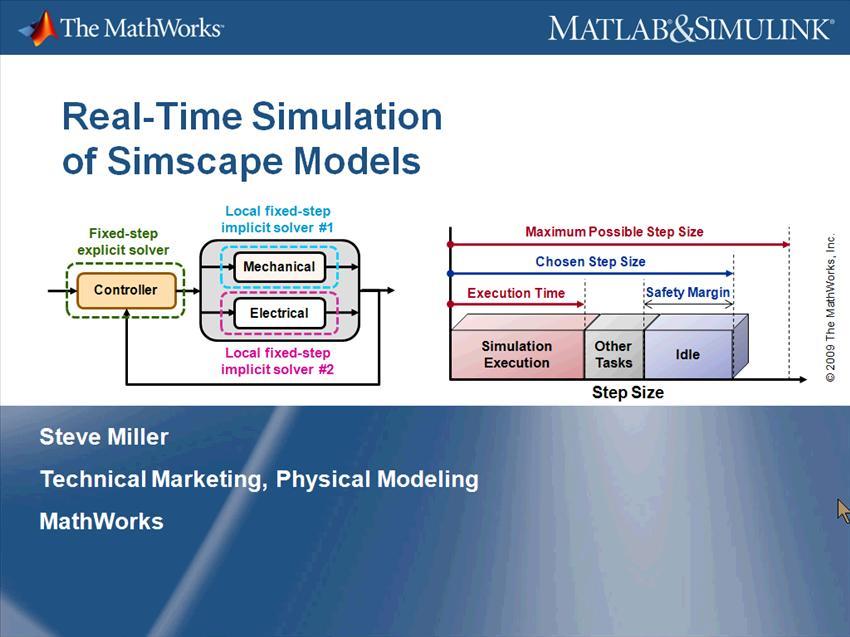
• How to choose a fixed-step solver
• Why fixed-cost simulation is critical for real-time simulation and how to configure a fixed-cost simulation
• How MATLAB can be used to accelerate this process
• Advances in Simscape that make it easier to get models to run in real-time
Real-time simulation of multidomain physical system models (mechanical, electrical, hydraulic, etc.) requires finding a combination of model complexity, solver choice, solver settings, and real-time target that permit execution in real time. A better understanding of the tradeoffs involved in each of these areas makes it easier to achieve this goal and use Model-Based Design to reap the benefits of using virtual systems prior to building hardware prototypes.
In this webinar we use xPC Target as our real-time simulation platform, but the concepts and settings described in this webinar apply to other real-time platforms as well. In this webinar, we do not focus on the selection of real-time hardware. The information contained in this webinar is summarized in the white paper “Real-Time Simulation of Simscape Models”
Making Control System Development Easier with MATLAB and Simulink (Part 2): Plant Modeling
This particular webinar will concentrate on plant modeling for control design. MathWorks engineers will present several approaches for creating plant models in Simulink. Through product demonstrations they will show how you can create and refine plant models by:
• Using first-principles modeling
• Using experimental test data for system identification
• Importing existing CAD assemblies
• Using test data to estimate model parameters
The first webinar in this series introduced how you can use dynamic simulation to model, design and verify control systems before testing on hardware. The remaining two webinars will detail the aspects of designing the control system (part 3), and testing the control system through simulation and real-time testing (part 4).
Through this webinar series MathWorks engineers will demonstrate how you can:
• Catch errors early in the development process where they are easier and cheaper to fix.
• Troubleshoot existing design problems systematically and effectively, without tying up actual hardware systems
• Test more thoroughly, by starting before hardware is available and by simulating conditions that would be dangerous or costly to examine with real hardware
• Try different control strategies safely and quickly
This will help you reduce development time and costs, improve quality, and deliver systems with higher performance and efficiency. Product Focus
[ul]
[li] Simulink®[/li][li] Simscape™[/li][li] Real-Time Workshop®[/li][li] xPC Target™[/li][/ul]
This webinar was recorded on 19 Jan 2010
Duration: 50 Minutes