مقدمة
أنظمة الملاحة مسؤولة عن التحكم بمركبة لنقلها من نقطة إلى أخرى بطريقة مستقرة وضمن مسار محدد.
لعمل ذلك، لا يكفي معرفة موقع (position) المركبة في الفضاء بل يجب أيضاً معرفة وضعيتها/سلوكها (attitude) وهذا يشمل معدل دورانها (rotation rate) حول كلٍ من محاورها الثلاث إضافة إلى معدل تسارعها (acceleration rate) باتجاه كلٍ من المحاور الثلاثة.
هناك نوعان من أنظمة الملاحة قيد الاستخدام اليوم، الأول هو GNSS، وهو اختصار لـ Global Navigation Satellite System أي نظام الملاحة العالمي بالأقمار الصناعية (ويشمل نظام GPS الأمريكي و GLONASS الروسي)، والثاني هو INS وهو اختصار لـ Inertial Navigation System أي نظام الملاحة بالقصور الذاتي. من المهم ملاحظة أن هاذين النوعين تكميليين (complementary) وليسا متنافسين، فالاعتماد على GNSS لوحده لا يكفي، لأنه يقدم معلومات حول الـ position فقط وليس عن الـ attitude، أما الـ INS فيقدم العكس، attitude لكن دون position. (ملاحظة: هناك طريقة تسمى dead reckoning تسمح بتحديد الـ position باستخدام INS فقط، لكنها تحتاج INS ذو دقة عالية جداً وهذا غير متوفر للهواة أو حتى أغلب الباحثين نظراً للتكلفة العالية جداً فقد يصل سعره إلى عشرات الآلاف من الدولارات).
إن استخدام الـ GNSS والـ INS معاً هو الطريقة المثلى المستخدمة للملاحة في الطائرات، السفن، المناطيد، الخ. من المهم معرفة أن لكل واحد ميزات وعيوب. معدل تحديث (update / refresh rate) الـ GNSS (أو GPS على سبيل المثال) منخفض ولا يتجاوز 1 Hz أو 10 Hz في حال استخدام وحدات GPS الخارجية مثلNEO-7 u-blox (لاحظ مرة أخرى أننا هنا نتكلم عن الأجهزة أو الأنظمة المتاحة بشكل تجاري للهاوي أو الباحث…بالطبع توجد أنظمة مخصصة للاستخدام في الطائرات مثلا ذات معدل تحديث أعلى لكن هذا ليس موضوعنا)، بينما معدل تحديث الـ INS يتجاوز 100 Hz وهذا فرق كبير، وكلما كانت مركبتك أكثر سرعة كلما احتجت إلى معدل تحديث أكثر دقة. (“المركبة” هنا كلمة عامة، فقد تكون المركبة هي الإنسان الذي يحمل بيده هاتفاً ذكياُ مزوداَ بأنظمة الملاحة…في هذه الحالة لا يلزم معدل تحديث مرتفع لأن سرعة الإنسان بالمتوسط هي 10 كم/ساعة، بينما في حال سيارة على طريق سريع فقد تصل سرعتها إلى 250 كم/ساعة وهنا يلزم معدل تحديث أعلى). من عيوب الـ INS هو ميله للانحراف (bias drift) بعد مدة زمنية معينة (دقائق معدودة في حال الأنواع التجارية الرخيصة) بينما لا يعاني الـ GNSS من هذه المشكلة. هناك جوانب أخرى لميزات وعيوب كلا النوعين لا يسعنا الوقت لذكرها.
والآن بعد أن شرحنا كل النوعين بإيجار يلزم ذكر طريقة دمج (fusion) كل منهما معاً للحصول على معلومات أكثر دقة. الدافع وراء الرغبة بدمجهما هي الاستفادة من مميزات كل منهما وتلاشي العيوب.
أشهر الطرق على الإطلاق هي باستخدام Kalman Filter، وهي خوارزمية تسمح بدمج بيانات أي حساسين سواء GNSS/INS أو غيره. تعمل هذه الخوارزمية على شكل cascaded stages أي مراحل متعاقبة، وغالباً ما يتم استخدام 15-stages أي 15 مرحلة. عيوب الخوارزمية هي الاستهلاك العالي للعمليات الحسابية (computationally intensive) مما يدفع الكثير من الهواة لاستخدام الـ Complimentary Filter ذو الدقة الأقل لكن باستهلاك متوسط للعمليات الحسابية.
لاحظ أنه باستخدام GNSS و INS تكون قد حصلت على نظام ملاحة لكن هذا النظام ما يزال غير كامل، فأنت بحاجة إلى وحدة حسابية سواء متحكم صغري microcontroller أو معالج CPU الخ وذلك لمعالجة خرج (output) نظام الملاحة.
نظام الملاحة العالمي بالأقمار الصناعية GNSS
هنا سنفصل الحديث عن أنظمة الملاحة العالمية بالأقمار الصناعية GNSS. أول نظام ظهر بهذه التقنية هو الـ GPS الأمريكي، تبعه الـ GLONASS الروسي. ما يزال نظام Galileo الأوروبي قيد التطوير وكذلك الحال مع نظام Compass الصيني.
الفكرة العامة لجميع الأنظمة متشابهة لذلك سنركز على GPS كونه النظام الأشهر والأكثر انتشاراً وصاحب العدد الأعلى من الأقمار الصناعية قيد الخدمة. (نظام GLONASS وصل إلى حالة الخدمة الكاملة في عام 2010 فقط، مما يفسر قلة انتشاره).
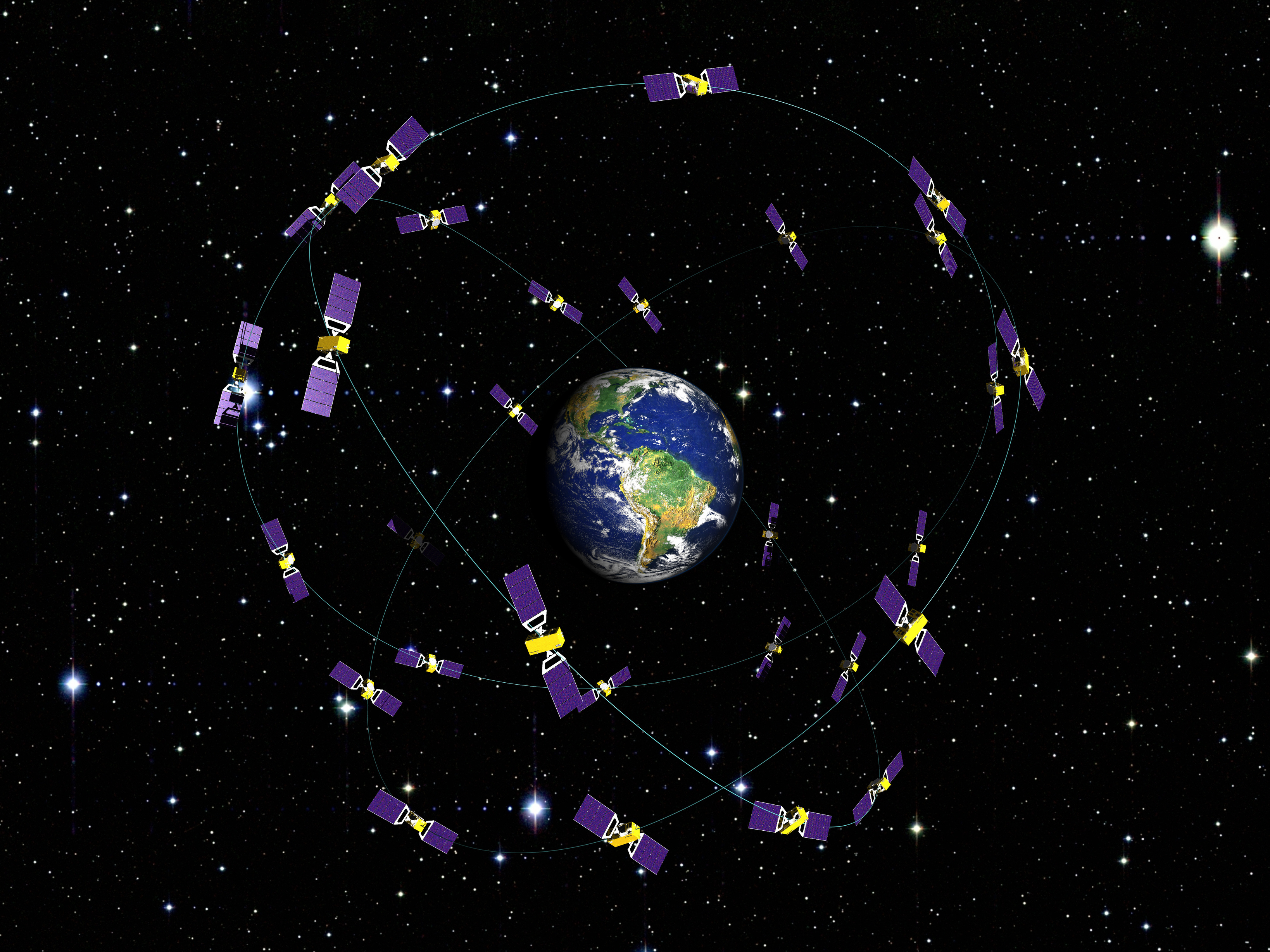
إن نظام GPS يقدم معلومات عن الموقع (position) والتوقيت (timing) في كل الأحوال الجوية على أي مكان في الأرض، وكانت وزارة الدفاع الأمريكية قد أطلقته للأغراض العسكرية عام 1973 ثم سمحت باستخدامه للأغراض المدنية بعدها. يتكون النظام من ثلاث مقاطع: مقطع الفضاء (space segment)، مقطع التحكم (control segment) ومقطع المستخدم (user segment). يتكون مقطع الفضاء من 24 قمراً صناعياً تخدم جميع المستخدمين في أي مكان على الأرض، حيث يلزم 4 أقمار على الأقل لتلقي الخدمة.
مبدأ عمل GPS هو التثليث المساحي (trilateration) بمساعدة الأقمار الصناعية، حيث تقيس وحدة GPS المسافة بمعلومية سرعة الأمواج الكهرومغناطيسية (تحديداً أمواج الراديو) في الهواء، وهي قريبة من سرعتها في الفراغ (تذكر أن معامل الانكسار refraction index للهواء هو 1.0003).
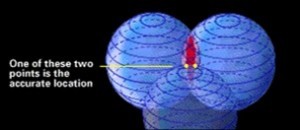
لنفرض أننا استطعنا تحديد بعدنا عن قمر صناعي معين، مثلاً 20000 كم. هذا يعني أننا نقع على كرة بعدها 20000 كم عن القمر الصناعي. لنفرض الآن أننا كررنا نفس الشيء مع قمر صناعي آخر. ستتقاطع الكرتان في دائرة. أضف قمراً صناعياً ثالثاً وستتقاطع الكرة مع الدائرة في نقطتين. إذن موقعنا هو إحدى هاتين النقطتين. عادة ما تكون إحدى النقطتين “سخيفة”، بمعنى أنها تقع خارج سطح الكرة الأرضية الخ، مما يجعلنا نستثني هذه النقطة وبالتالي يصبح موقعنا معلوماً. على أي حال، يمكن استخدام قمر صناعي رابع لتحديد الموقع بما لا يدع مجالاً للشك، لكن في أغلب الأحوال لا يلزم إلا 3 أقمار (الرابع يستخدم لحساب الزمن بدقة، أنظر في الأسفل).
السؤال الآن هو كيفية حساب المسافة (البعد عن القمر الصناعي). بما أن السرعة تساوي المسافة / الزمن، والسرعة معلومة، إذن علينا حساب الزمن. لاحظ أن الإشارة (الموجة) الكهرومغناطيسية الصادرة عن القمر الصناعي تستغرق فقط 0.06 ثانية بالمتوسط لتصل إلينا مما يتطلب طريقة معقدة لحساب الزمن بشكل دقيق. بشكل عام، يصدر القمر الصناعي إشارة معينة، وتولد وحدة GPS التي بيدك إشارة مماثلة، ويتم عمل correlation بين الاثنتين. بالطبع هناك فرق بينهما نظراً لأن إحداهما قد سارت مسافة طويلة قبل أن تصل إليك. إذن عليك أن تؤخر (shift / delay) إشارتك بمقدار معين ثم تعيد عمل الـ correlation مجدداً. ستكرر هذه العملية حتى تصل إلى تطابق كامل. عندها يكون الزمن المستغرق هو مقدار التأخير (الـ delay) المستخدم.
إذن، يلزمنا ساعات دقيقة لنستطيع حساب تلك الأزمنة القصيرة جداً. الأقمار الصناعية الخاصة بـ GPS تستخدم 4 ساعات ذرية (atomic clocks وهي ساعات تعتمد على الترددات الصادرة عن انتقال الالكترونات من مستوى لآخر في ذراتها)، اثنتان منهما تستخدمان عنصر السيزيوم Cs واثنتان تستخدمان الروبيديوم Cs. مقدار الخطأ في هذه الساعات هو 1 نانو ثانية في اليوم.
حيث أن وحدة GPS لدى المستخدم لا تحتوي على ساعة ذرية، فإنها تستخدم الإشارة المرسلة من القمر الصناعي (ذو الساعة الذرية) لتصحيح الساعة الداخلية بشكل مستمر. تصور أن لديك ساعتين، الأولى تعطيك خطأ 1 نانو ثانية كل يوم، أما الأخرى تعطيك خطأ 1 نانو ثانية كل دقيقة. لتصحيح الساعة الثانية بمعلومية الساعة الأولى، نقوم بإعادة ضبط (reset) الساعة الثانية كل دقيقة لتتطابق مع الساعة الأولى. في هذه الحالة لن يزيد الخطأ في أي حال من الأحوال عن 1 نانو ثانية في الدقيقة. الإشارة المستخدمة مشروحة أدناه.
بالمجمل، تتكون الرسالة المرسلة من ثلاث أقسام، قسم التوقيت، قسم Ephemeris ويحتوي على معلومات فلك (orbit) القمر الصناعي بشكل دقيق وفي النهاية قسم Almanac ويحوي معلومات خاصة بالفلك للقمر الصناعي وباقي الأقمار الصناعية الـ 32 لكن بدقة متوسطة (coarse).
ترسل أقمار GPS إشارتين، الأولى L1 C/A والثانية L2 P/Y، كل منهما على تردد مستقل، وكلاهما بمعدل 50 بت/ث. يستغرق إرسال الرسالة الكاملة 750 ثانية. لاحظ أن L1 C/A هي الإشارة المتاحة للاستخدامات المدنية، أما L2 P/Y فهي رسالة مشفرة خاصة بالاستخدامات العسكرية للجيش الأمريكي. جميع الأقمار الصناعية في منظومة GPS تعمل على نفس الترددات، ولذلك يلزم استخدام طريقة للتضميم (multiplexing). يستخدم الـ GPS طريقة Code Division Multiple Axis أو CDMA اختصاراً وهي نفس الطريقة المستخدمة في أنظمة الاتصالات الخلوية من الجيل الثالث 3G.
إشارة C/A ترسل على تردد L1 بمقدار 1575.42 ميجاهرتز، بينما ترسل إشارة P/Y على تردد L2 بمقدار 1.2276 ميجاهرتز. حيث أن النظام يستخدم CDMA إذن هناك code يجب استخدامه لعمل الـ code modulation اللازم. كلا الـ L1 والـ L2 تستخدمان pseudo-random code، لكن الأولى بمعدل 1.023 ميجا تشيب (chip)/ث والثانية بمعدل 10.23 ميجا تشيب/ث.
من المهم معرفة أنه بحسب النظرية النسبية الخاصة والعامة فهناك بعض التصحيحات اللازمة. حسب النسبية الخاصة، فإن الزمن في القمر الصناعي يتأخر عن الزمن على الأرض بمعدل 7 مايكرو ثانية في اليوم نظراً لظاهرة التأخير الزمني (time dilation) الناتجة عن الحركة النسبية للقمر الصناعي والأرض. حسب النسبية العامة، فإن انحناء (curvature) منحنى الزمكان حول الأقمار الصناعية أقل منه قرب سطح الأرض (نظراً لبعد الأقمار الصناعية عن مركز الأرض)، وبالتالي فإن الزمن في القمر الصناعي يزيد عنه على سطح الأرض بمعدل 45 مايكرو ثانية في اليوم. بدمج الحسابات معاً نرى أن الزمن في القمر الصناعي يزيد عنه على كوكب الأرض بمعدل 45-7=38 مايكرو ثانية. تم أخذ هذه الحسابات الهامة جداً بعين الاعتبار في تصميم المنظومة بأكملها ولا يلزم عمل أي شيء من طرف المستخدم.
نظام الملاحة بالقصور الذاتي INS
يتكون هذا النظام من حساسين منفصلين، الأول هو حساس التسارع الخطي (linear acceleration) ويسمى accelerometer والثاني هو حساس التسارع الزاوي (angular acceleration) ويسمى gyroscope. فيما مضى، كان استخدام هاذين الحساسين مقتصراً على الجيوش وشركات الطيران نظراً للتكلفة العالية، لكن مع ظهور تقنية الأنظمة الكهرو ميكانيكية الميكروية Micro Electro Mechanical Systems أو MEMS اختصاراً أصبحت هذه الأنظمة بمتناول المستخدم العادي بسعر لا يتجاوز 100 دولار في أغلب الأحيان. هذا القسم يشرح هاذين الحساسين العاملين بتقنية MEMS ولا يتطرق لأي تقنيات أخرى. قد تجد البعض يطلق على هذه الأنظمة اسمه Inertial Measurement Unit أو IMU اختصاراً. بشكل دقيق، INS هو اسم النظام، أما IMU فهو اسم الوحدة المستخدمة، لكن ستجد المراجع تستخدم الاختصارين بشكل متبادل.
لعل أهم ميزة للـ INS هي كونه passive system، فهو أولاً لا يعتمد على أي مصدر خارجي (كما هو الحال مع GNSS الذي يعتمد على الأقمار الصناعية)، وثانياً لا يصدر أي إشارة خارجية (كما هو الحالة مع أنظمة الملاحة بالرادار والتي تصدر أمواج كهرومغناطيسية). يعتمد هذا النظام في آلية عمله على قانون نيوتن الثاني، تحديداً F=ma. مشكلة الـ INS (تذكر أننا هنا نقصد MEMS INS فقط وليس أي INS آخر) هي أن الخطأ (error) فيه كبير (باستثناء بعض الوحدات مرتفعة الثمن والتي قد يصل سعرها إلى أكثر من 10 آلاف دولار).
حساس التسارع الزاوي Gyroscope
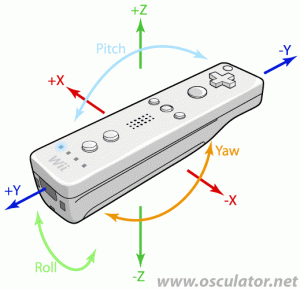
يقيس هذا الحساس معدل الدوران حول كل محور من المحاور الثلاث، كما يوضح الشكل التالي:
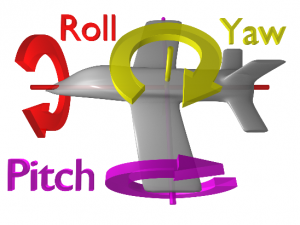
التسميات أعلاه هي التسميات المصطلح عليها. الآن دعونا نرى آلية عمل الـ MEMS Gyroscope.
أغلب الأنواع المنتشرة تجارياً تستخدم تأثير Coriolis Force كآلية للعمل. هذا التأثير هو كالتالي: لنأخذ جسماً يتحرك بسرعة v وفي نفس الوقت يدور حول أحد محاوره بسرعة زاوية w …. كمثال رصاصة تتحرك باتجاه معين وفي نفس الوقت تدور حول أحد محاورها شرط أن لا يتطابق المحور مع اتجاه الحركة). في هذه الحالة فإن الجسم يشعر بقوة مقدارها واتجاهها كالتالي:
Fc = -2m w X v
الآن لنلقي نظرة على الشكل التالي:
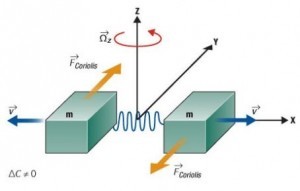
لدينا كتلتان تتذبذبان وتتحركان بتاتجاهين متعاكسين. عندما يدور الجسم حول المحور z (أو أي محور آخر، هناك كتلتان منفصلتان لكل محور على حدة) فأنه بحسب المعادلة أعلاه ستشعر كل كتلة بقوة في اتجاه مختلف، مما ينتج عنه أن المساحة المتقابلة بين الكتلتين ستقل. الآن لو تخيلنا أن الكتلتين هما لوحين لمكثف، فإن سعة المكثف تقل بنقصان المساحة المتقابلة، هذا النقص في السعة يمكن ترجمته إلى نقص في الجهد الكهربائي مثلاً، وهذا يمكن قياسه ومن ثم تحويله إلى إشارة رقمية (باستخدام ADC) واستخدامه حسب الحاجة.
لاحظ أن الجيروسكوب لا يستطيع الإحساس بالتسارع الخطي لأنه في تلك الحالة ناتج عملية الضرب الخارجي (cross product) هو صفر.
الآن وقد انتهينا من آلية العمل دعونا نرى ما هي أهم الخصائص التي يجب الانتباه إليها قبل شراء Gyroscope ما.
- نطاق القياس (Measurement Range). أغلب الجيروسكوب المتوفرة تجارياً تستطيع قياس حتى ±2000 درجة دوران في الثانية. كلما كان النطاق أكبر كلما كان أفضل.
- عدد المحاور (Number of Axes). بالطبع 2 محاور أفضل من 2، و 2 أفضل من 1.
- الحساسية أو الدقة (Sensitivity / Resolution). مؤشر على أقل معدل دوران في الثانية يمكن الإحساس به. طريقة التعبير عن هذه الحساسية هي بالنظر إلى مقدار التغير الحاصل في خرج الجيروسكوب عند تعرضه لمعدل دوران بقيمة درجة واحدة في الثانية. إن كان التغير صغيراً، فهذا يعني أن الجيروسكوب سيئ وبالكاد شعر بذلك الدوران. إن كان التغير كبيراً فهذا مؤشر على الدقة العالية التي يتمتع بها الجيروسكوب. وحدة القياس هي LSB/deg/sec أي كم عدد الـ least significant bits التي ستتغير مقابل كل درجة في الثانية من الدوران.
- اللاخطية (Non linearity). حيث ان خرج الجيروسكوب هو جهد كهربائي، فإننا نرغب بأن تكون العلاقة بين درجة الدوران وبين الجهد علاقة خطية قدر الإمكان ليسهل تفسير إشارة الجهد الكهربائي هذه.
- تحمل الصدمات (Shock Tolerance). تقاس قوة الصدمة بالنيوتن أو بالـ g (أي 9.8 نيوتن) وليس غريباً رؤية حساسات جيروسكوب تتحمل صدمات بقوة 10000g. كلما كان الرقم أعلى كلما كان أفضل.
- معدل نقل البيانات (Bandwidth). أو معدل التحديث (refresh/update rate). كلما كان الجيروسكوب قادراً على إعطاء تحديثات أكبر في الثانية الواحدة كلما كان أفضل. الوحدات المتاحة تجارياً تعطي معدل تحديث 1000Hz وربما أكثر.
- الانحياز (Bias). هذا المقياس هو مؤشر على الضوضاء ويقاس بوحدة درجة/ساعة. كلما كان الانحياز أقل كلما كان أفضل. كلما كان الانحياز ثابتاً مع الزمن ودرجة الحرارة كلما كان أفضل.
- المشي العشوائي Random Walk. هذا مقياس للانحراف المعياري للضوضاء (noise) ويقاس بوحدة درجة/ساعة. في حال كان الجيروسكوب ثابتاً فيفترض أن يكون الخرج صفراً، لكن لأن العالم ليس وردياً فللأسف هناك انحياز قد يصل الانحراف المعياري له إلى 50 درجة بعد ساعة واحدة فقط.
هناك مقاييس أخرى لكن بشكل عام المقاييس أعلاه توضح الفكرة العامة.
حساس التسارع الخطي Accelerometer
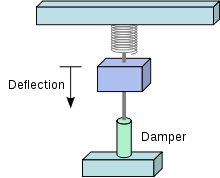
لدينا كتلة صغيرة متصلة بزنبرك مثبت على لوح. ترتبط الكتلة بدورها بلوح آخر. عند تعرض الكتلة لتسارع، تشعر الكتلة بقوة حسب قانون نيوتن الثاني F=ma. هذه القوة، حسب قانون هووك، تؤدي إلى انضغاط الزنبرك F=kx (حيث k هو ثابت الزنبرك و x هي الإزاحة). النتيجة هي تغير المسافة بين اللوحين إما ازدياداً أو نقصاناً. إن كان اللوحان متصلان بتيار كهربائي بحيث يعملان كمكثف، فإن تغير المسافة بينهما يؤدي إلى تغير سعة المكثف وهذا يترجم إلى تغير في الجهد الكهربائي الذي يمكن قياسه.
بالنسبة لمقاييس الأداء، فبشكل عام تنطبق نفس الفكرة في الجيروسكوب. نطاق القياس هنا يصل إلى ±16g، مازلنا نريد 3 محاور، الدقة تقاس بـ LSB/g. كلما كان الخرج خطياً كلما كان أفضل. تحمل الصدمات، معدل نقل البيانات، الانحياز والمشي العشوائي جميعها تنطبق على حساس التسارع الخطي مع الأخذ بعين الاعتبار أننا نقيس تسارع خطي (نعبر عنه بوحدة نيوتن) وليس تسارع زاوي (نعبر عنه بوحدة درجة/ث).
من المهم ملاحظة أن الـ Gyroscope والـ Accelerometer يعطيان معدلات التسارع اللحظية. مثلاُ إن كان معدل التسارع الزاوي الحالي حول محور X هو 0.03 درجات ومن ثم في القراءات العشر التالية حصلنا على نفس القيمة، ثم في القراءات الخمس التالية حصلنا على 0.04 ثم حصلنا على صفر، فهذا يعني أننا (على فرض أن الزمن بين كل قراءة والتالية هو 1 ملي ثانية) قد درنا حول محور X بقيمة 0.03deg/sec x 10 x 1ms + 0.04deg/sec x 5 x 1ms = 0.3m+0.2m=0.5m degree.
من المهم أيضاً معرفة أن الخطأ (error) في حالة الجيروسكوب يتراكم مع مرور الوقت، وبالتالي لا يمكنك الاعتماد على الجيروسكوب بعد مرور عدة دقائق مثلاً، لكنك تستطيع الاعتماد عليه لحظياً أي أن الـ high frequency drift منخفض. العكس صحيح في حالة حساس التسارع الخطي: لحظياً نسبة الخطأ فيه كبيرة، لكن نسبة الخطأ هذه متوسطها عبر الزمن قريب من الصفر أي أن الـ low frequency drift منخفض. كما ترى فالـ error model للحساسين مختلف تماماً وهذا يجعل الاعتماد على أحدهما دون الآخر غير مجدي بينما الاعتماد عليهما معاً مفيد لأن كلاً منهما يكمل الآخر.
دمج الحساسات معاً (Sensor Fusion) باستخدام مرشح كالمان Kalman Filter
هذا الموضوع متشعب وهناك العديد من الكتب عن مرشح كالمان. الكلمة المفتاحية هنا هي Estimation Theory أو نظرية التقدير. عند تطبيق هذه النظرية على أنظمة الملاحة، عادة ما يستخدم المصطلح sensor fusion. هنا سنعطي لمحة سريعة جداُ.
سمي هذا المرشح على اسم مطوره Rudolf Kalman والذي نشر بحثاً علمياً عنه في عام 1960. ومنذ ذلك الحين ومرشح كالمان هو الطريقة المفضلة لدمج بيانات الـ INS والـ GNSS (وغيرها، كالـ vision system navigation) معاً. يتكون المرشح من مجموعة من المعادلات الرياضية التي تقوم على مبدأ predictor-corrector estimation، إذن الغرض الرئيسي من المرشح هو تقدير estimate حالة الجسم بمعلومية خرج كلا الحساسين ومعلومية نموذج الخطأ (error model) الخاص بكل منهما. يعمل مرشح كالمان على تقليل الخطأ: minimizing the estimated error covariance. نظراً لأن مرشح كالمان بشكله الأصلي يفترض أن معادلات النظام خطية (linear equations)، فهناك Extended Kalman Filter والذي يقوم على الاستخطاط (Linearizing) حول المتوسط (mean) والتغاير (covariance).
من المهم الانتباه إلى وجود طريقتين للـ “دمج” الأولى هي tight coupling والثانية loose coupling. الأولى هي الأفضل لكنها تحتاج الحصول على بيانات الـ GNSS قبل معالجتها (أي الـ raw data). للأسف هذا غير متاح في الهواتف الذكية (أنظر القسم 5 أدناه) فكل ما هو متاح هي النتيجة النهائية (أي خط الطول والعرض)، في هذه الحالة نلجأ للطريقة الثانية الأقل دقة.
أمثلة عملية
هاتف Samsung Galaxy S4
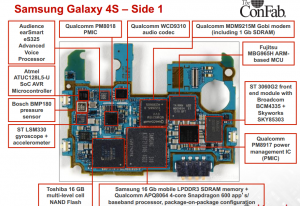
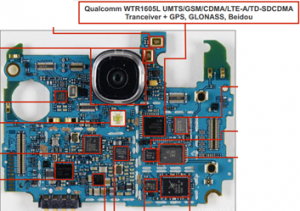
الهواتف الذكية تحتوي على العديد من الحساسات. هنا سنتطرق لهاتف Galaxy S4 نظراً لاحتوائه على العديد من الحساسات ولأن نظام تشغيله Android مفتوح المصدر.
يحتوي هذا الهاتف الذكي على الحساسات التالية:
- 3-axis accelerometer من نوع LSM330 من شركة STmicroelectronics الأمريكية بنطاق قياس ±16g.
- 3-axis gyroscope نفس الوحدة أعلاه تحتوي على كل من الحساسين في نفس الـ chip، نطاق القياس ±2000º/sec.
- Barometer من نوع BMP180 من شركة Bosch الألمانية، نطاق القياس 300 to 1100hPaأي -500 إلى 9000 متر.
- 3-axis magnetometer من نوع YAS532B من شركة Yamaha اليابانية، نطاق القياس حتى 1200µT.
- GPS+GLONASS من نوع BCM4752 من شركة Broadcom الأمريكية (لاحظ أنه في الموديلات المحتوية على Qualcomm Chip فإن الحساس المستخدم مختلف).
لاحظ أننا لم نتطرق إلى حساس المجال المغناطيسي في هذا المقال، نظراً لأن هذه الحساسات عادة ما تكون غير دقيقة بشكل كافٍ للاعتماد عليها. هذا الحساس هو أساس عمل الـ digital compass. أيضاً لاحظ وجود حساس الضغط (Barometer) وذلك لأن دقة الـ GPS أو الـ GLONASS عادة ما تكون غير كافية في الاتجاه الرأسي (قد يصل الخطأ إلى 30 متر)، بينما الدقة في الاتجاه الأفقي لا يزيد الخطأ فيها عادة عن 5-10 متر. يمكن الرجوع للـ Datasheet الخاصة بكل من الحساسات أعلاه لمعرفة معلومات أكثر كالـ refresh rate مثلا، (الـ GPS/GLONASS في هذا الهاتف وغيره يشكل bottle-nick لأن معدل التحديث فيه 1 هرتز فقط).
إن وجود كل هذه الحساسات في هاتف ذكي واحد بشكل مدمج، ووجود معالج رباعي النواة بسرعة 1.6 أو 1.9 جيجاهرتز وذاكرة عشوائية بسعة 2 جيجا بايت يجعل من هذا الهاتف كنزاً حقيقياً لمن أراد استخدامه في مشاريع التخرج أو في أي مشروع للهواة.
Wii Remote Plus
جهاز Wii من شركة Nintendo اليابانية هو جهاز لألعاب الفيديو شبيه بالـ Play Station أو Xbox لكنه مخصص للألعاب العائلية نوعاً ما. يستخدم هذا الجهاز جهاز تحكم remote control يمكسه اللاعب بيده ويحركه في أي اتجاه (تخيل أنك تلعب لعب جولف مثلاً). يحتوي جهاز التحكم هذا على الحساسات التالية:3-axis accelerometer من نوع ADXL330 من شركة Analog Devices الأمريكية، بنطاق قياس ±3g فقط.
- 2-axis gyroscope من نوع IDG-650 من شركة Invensense الأمريكية، بنطاق قياس ±2000º/sec.
- 1-axis gyroscope من نوع ISZ-650 من شركة Invensense الأمريكية، بنطاق قياس ±2000º/sec.
- الجيل الأول من الجهاز كان يحتوي على accelerometer فقط لكن الجيل الجديد Wii Remote Plus يحتوي على accelerometer و gyroscope، إضافة إلى microcontroller و infrared unit.
الميزة الكبرى هنا هي رخص ثمن جهاز التحكم والذي يمكن شراؤه بشكل منفصل عن المنصة الرئيسية، حيث يكلف ما لا يزيد على 35 دولار أمريكي (وهناك أنواع صينية بنصف السعر، إلا أن الجودة قد لا تكون مضمونة).
المراجع:
Yueming Zhao, GPS/IMU Integrated System for Land Vehicle Navigation based on MEMS, Licentiate thesis in Geodesy (2011)
http://www.trimble.com/gps_tutorial
http://www.kowoma.de/en/gps/satellites.htm
http://www.astronomy.ohio-state.edu/~pogge/Ast162/Unit5/gps.html
http://www.techinsights.com/inside-samsung-galaxy-s4/
http://www.markusrapp.de/motion-control/
م. علي السقا