اجا ببالي احكي عن المتحكم PID باسلوب بسيط … اكيد الكل او الاغلب بعرفه … وبعرف انه اله 3 متغيرات هنقعد نغير فيهم لحد ما نصل للاستجابة المرغوبة (Desired Response) وبالاخص هنا احنا معنيين بالاستجابة العابرة (Transient Response) وفي طبعا الها عدة خصائص زي overshoot, settling time, steady state error وبتغيير هذه المتغيرات تبعت المتحكم اللي هي (P, I, D) بتتغير معنا الخصائص … ولكن اغلب اللي بعرفوه بيقولك خلص هنقعد نغير لحد ما نحصل علي اللي بدنا اياه وخلص او يستعين بجدول ممكن يعرف منه تأثير كل متغير على بعض الخصائص … وهذا كويس … ولكن مش الافضل … لازم تكون فاهم معني كل من P, I,D وشو وظيفتها … عشان اذا فهمتهم مش هتحتاج تجرب او تستعين بجدول بعد هيك …… الشرح تقريبا مرتبط بالصورة.
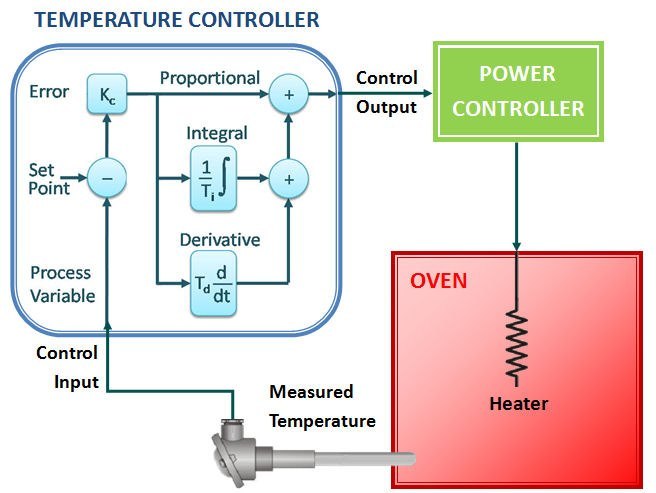
بالنسبة للمتغير الاول Proportional term : P … هذا بتحكم بشكل اساسي بمقدار الطاقة اللي رايحة للجهاز اللي بدك تتحكم فيه ونفترض ماتور او فرن كهربي …. وبالتالي انت بتتحكم بالسرعة او بالحرارة مثلا … وهذا المتغير لازم يكون موجود دايما وهو اساسي … ومن غيره تقريبا ما في طاقة بتروح للجهاز تبعك وبالتالي مش هيشتغل …. واذا طبعا كان هالمتغير كبير هتكون مقدار الطاقة اللي رايحة كبيرة وسريعة مما نستنتج انه ممكن يكون في overshoot عالية … واذا صغر ممكن ما تروح الطاقة الكافية للجهاز تبعي مما ينتج انه هيكون في Steady state error.
المتغير التاني هو Integral term : I … وهذا بشكل اساسي مرتبط بالزمن … لانه هو عبارة عن تكامل ولو سألت ما هي نتيجة تكامل ثابت X هتقولي هيطلع X*t بمعنى انه الخرج تبع هالمتغير هذا هيزيد مع الزمن …. فلو انا دخلت اله مثلا 1 فولت لمدة دقيقة هتلاقي الجهد بعد هالدقيقة صار مثلا 60 فولت … لانه ال 1 فولت بتقول للمكامل خلي الخرج تبعك يزيد بمقدار 1 فولت بالثانية …هذا مثلا … وهكذا … وطبعا هذا المتغير مفيييييييييد جدا للتخلص من steady state error … طبعا ليش … لانه زي ما هو بالشكل لما يكون هناك في error معناته انه خرج المكامل هيكون اله قيمة وبتزيد مع الزمن وبتزيد الطاقة لجهازي لحد ما يصل جهازي للنقطة المرغوبة وقتها ال error = 0 وهيصير خرج المكامل ثابت ما بزيد… بهذا بضمنلي اصل لل SSE =0 دائما …. ولكن اذا تم استخدامه لوحده فانه ينتج عنه عدم استقرار بالنظام لهذا يجب استخدامه مع ال P.
اخر متغير وهو Derivative term : D وهو متغير الخرج تبعه بتناسب تناسب طردي مع مقدار التغير في الدخل تبعه … والدخل تبعه هنا هو ال error فلو مثلا انا طلبت من ماتور يتحرك من سرعة 100 الى سرعة 1000 هتلاقي هذا المتغير كشف هالطلب هذا بسرعة وبعمل على تخفيف الطاقة اللي هيطلقها المتغير P ولكن بدرجة معقولة بحيث يلغى ال overshoot او يخففها وبنفس الوقت يعطي للجهاز حقه من الطاقة … السبب لانه بعد ما انا اطلب من الماتور هالطلب بالتغيير من 100 الى 1000 هتلاقي هذا المتغير الخرج تبعه كبير ولكن بعدها بصغر كتير وممكن يصل صفر لاني ما طلبت طلب تاني ولانه ال error صغرت كتير …. فهذا مفيد في تخفيف ال overshoot ولكن اله مشكلة انه ممكن ينشأ عنه noise نتيجة خرجه المضطرب اذا كانت قيمته كبيرة كتير ….
نتمنى ان نكون أضفنا معلومة لكل من يعرف او لا يعرف بأشهر متحكم مستخدم في علم التحكم ……
م. وليد عيسى